
1月16日,印度的兩顆小衛(wèi)星成功實現(xiàn)交會對接,由此成為第四個實現(xiàn)太空交會對接的國家,這也是該國實現(xiàn)空間站和載人登月夢想的至關重要的一步。按計劃,成功對接鎖緊后,兩顆衛(wèi)星將測試它們之間的電力傳輸,然后分離并各自運行,預計壽命長達兩年。
2024年12月30日,印度發(fā)射了“追逐者”和“目標”2顆小衛(wèi)星,用于該國首次在太空進行交會對接試驗。兩顆衛(wèi)星原本應于2025年1月7日在470公里高的軌道上從相距20公里處開始第一次交會對接試驗。
然而,1月7日因準備不足,印度第一次交會對接試驗被迫推遲。此后印度在1月9日進行第二次試驗,結果又因兩顆衛(wèi)星在相距225米時,其中1顆衛(wèi)星發(fā)生意外偏離而不得不再次延期。三天后,印度進行了第三次對接試驗,但在兩顆衛(wèi)星相距僅剩3米時,因技術問題對接嘗試再次終止。
一波三折之后,印度的交會對接試驗終于在1月16日取得成功。由此可見,太空交會對接并非易事。
有人形容它就像在太空中放了一根針,然后在相距幾百千米的地面控制一根線去穿過那個針眼,屬于“高難度”動作。太空交會對接有何用途?有什么技術難點呢?

印度兩顆小衛(wèi)星交會示意圖
01
用途十分廣泛
空間交會對接技術十分重要,是實現(xiàn)空間站正常運行的先決條件,因為只有掌握這項技術,才能把人和貨物通過宇宙飛船或航天飛機送到空間站上去。
然而,這項技術又十分復雜,此前只有美國、俄羅斯和中國獨立掌握。現(xiàn)在,印度通過此次任務,成為世界第4個獨立掌握空間對接技術的國家。
空間交會對接是指兩個航天器在太空軌道上按預定位置和時間相會后在機械結構上連成一個整體。它目前主要有以下兩大用途:
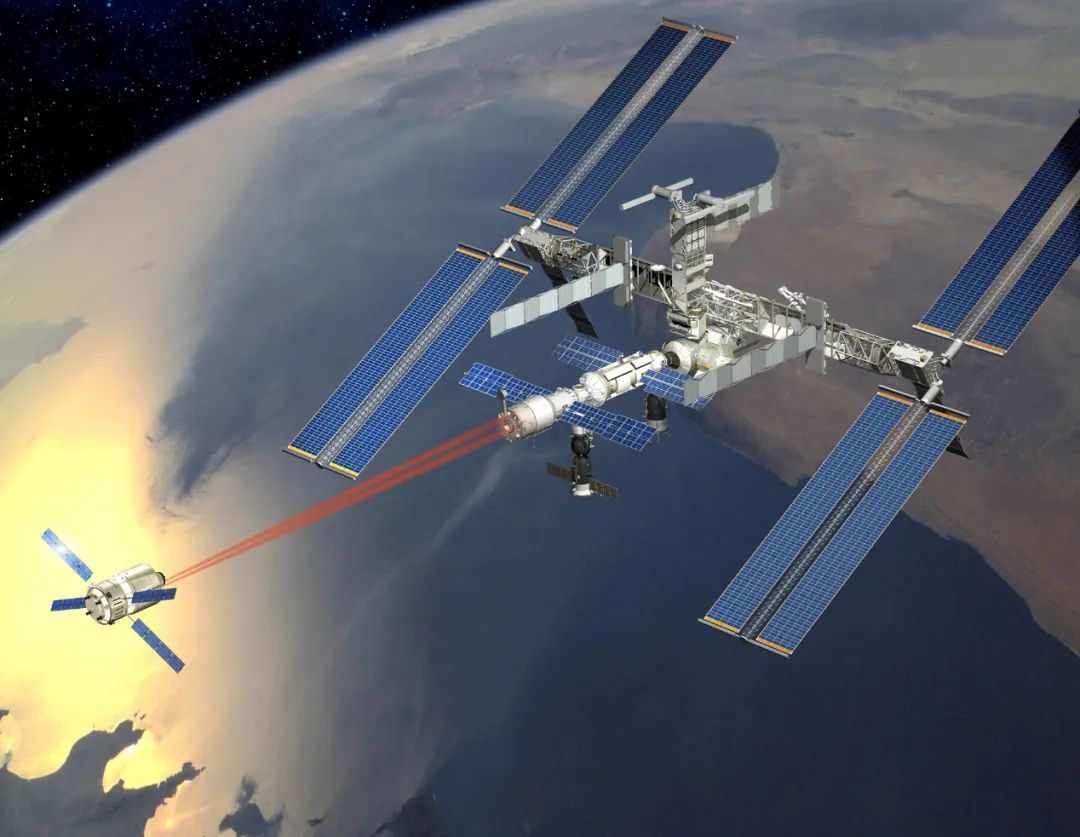
一是為長期運行的空間設施,如空間站提供人員運輸和物資補給服務。因為空間站雖然具有體積大、壽命長和功能強等一系列優(yōu)點,但它上天以后不能進行天地往返,需要通過宇宙飛船等天地往返運輸器與空間站交會對接后才能把人和貨物送上空間站或從空間站帶回地面。

“神舟”與“天宮”空間站在軌交會示意圖
二是在軌組裝大型航天器結構。由于目前的運載火箭能力有限,不可能把上百噸的航天器一次都運到地球軌道上,所以采用空間交會對接的方式建造,即把要建造的航天器分成若干部分陸續(xù)發(fā)射到某一高度的軌道上,然后通過交會對接技術把它們聯(lián)結成一個組合的整體。
空間交會對接還可用于使2個航天器在太空相互支持和進行航天器重構以實現(xiàn)系統(tǒng)優(yōu)化等方面。
02
兩種控制方式
現(xiàn)在,航天器之間進行空間交會對接主要采用兩種方式:一種是自控方式,另一種是手控方式。它們各有千秋。
在2個航天器距離較遠時,一般都采用地面遙控或自控;在距離較近時,既可以采用自控,也能采用手控進行交會對接。
歐洲“自動轉(zhuǎn)移飛行器”貨運飛船與“國際空間站”自動交會示意圖
采用自控的優(yōu)點是比較省事,效率較高;其缺點是設備復雜,靈活性差,遇到突發(fā)情況不能及時處理,偶爾會導致交會對接失敗。俄羅斯主要采用這種方式。
采用手控的優(yōu)點是可靠性強,在交會對接出現(xiàn)問題時航天員可以及時采取相應措施解決;缺點是航天員的勞動強度很大,并受空間環(huán)境條件的影響。美國主要采用這種方式。


神舟九號航天員景海鵬、劉旺進行手控交會對接訓練
另外,采用手控交會對接對航天員提出了很高的要求。它要求航天員能準確判斷兩個航天器的相對速度和姿態(tài),并通過精細操控手柄不斷調(diào)整。
此外,由于航天員還要面臨燃料消耗和時間的限制,必須在一定時間里完成對接,所以對航天員的心理素質(zhì)也是考驗。失重環(huán)境也會給航天員手控交會對接帶來不適的生理反應,這些都會影響手控交會對接的操作質(zhì)量。
2012年,航天員劉旺通過手動控制神舟九號飛船,成功與天宮1號目標飛行器實現(xiàn)了我國首次手控交會對接。
隨著用于交會對接的設備質(zhì)量日益穩(wěn)定,目前空間交會對接主要以自控為主,以手控為輔,在自控失靈時,改用手控,這樣可以提高交會對接的經(jīng)濟性和可靠性。
所以,應全面掌握手控和自控對接這2種方式,它們可以互為備份,為航天器之間的成功對接增加一個重要的“安全閥”。
我國航天員已熟練掌握這兩種控制方式。我國載人航天器之間進行交會對接時,就是以自控為主,以手控為輔。
03
四大技術難點
由于空間交會對接技術十分復雜,所以國外已發(fā)生過近20次空間交會對接故障,甚至出現(xiàn)了兩個航天器發(fā)生“追尾”。

1997年,在俄羅斯進步M-34貨運飛船與和平號空間站交會對接時,因為飛船失控,而與空間站發(fā)生碰撞,結果導致空間站光譜艙和太陽翼受損
交會對接包括交會和對接兩個部分。交會是指兩個或兩個以上航天器在空間軌道上按預定時間和位置停靠相會;對接是指兩個航天器在空間軌道上通過對接機構相互接觸并連成一個整體。所以,航天器之間在空間進行對接前要先交會,即相互接近。
在空間交會對接的兩個航天器中,一個稱目標飛行器,一般是空間站等大型航天器,它作為準備對接的目標,交會對接時保持穩(wěn)定運行狀態(tài);另一個稱追蹤飛行器,一般是地面發(fā)射的宇宙飛船、航天飛機等,交會對接時它要通過變軌來追趕目標飛行器,實現(xiàn)兩者的交會對接。
空間交會對接技術主要有四大難點:
難點之一是速度極高,擬對接的兩個航天器時速達2.8萬千米,如果控制不好很危險,容易相撞或“擦肩而過”,“失之交臂”。
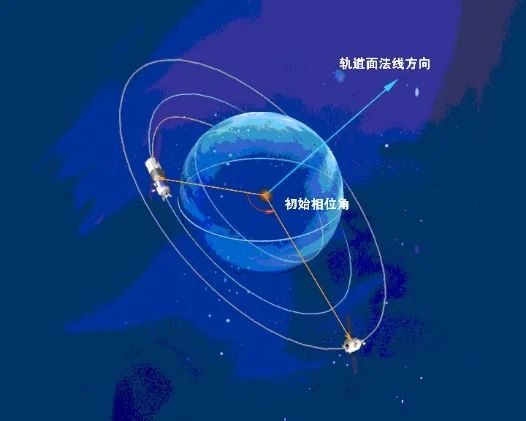
交會對接軌道示意圖
難點之二是要邊繞地球轉(zhuǎn)邊交會。在實現(xiàn)空間交會時,兩個要對接的航天器要一邊繞地球運行,一邊縮短它們的距離。這兩個航天器都是在三維空間飛行,一個航天器飛向另一個航天器時,必須沿著各自的軌道飛行,要縮短2個航天器的距離,不能像地面一樣加速,否則會離開原來軌道。
因此,追蹤飛行器通常先發(fā)射到比作為目標飛行器的航天器稍低的軌道上,然后經(jīng)過多次軌道調(diào)整,逐步追上目標飛行器。
難點之三是要有超高精度測量與控制設備。精確地測量和計算出對接雙方的軌道、距離和速度,才能使兩個航天器在同一軌道上運行。
另外,兩個航天器在對接時還要精確地控制它們的姿態(tài),使兩個航天器的對接面中心軸要在同一條對接軸上。
最后,還要求兩個航天器在相互接近時相對速度接近于零,不能有激烈的碰撞。在兩個航天器即將對接時,橫向誤差要小于18厘米,姿態(tài)誤差小于5°,相對速度小于0.2米/秒。
難點之四需研制出復雜、精巧和可靠的對接機構。
04
兩類重要設備
要實現(xiàn)2個航天器的空間交會對接,主要靠兩種重要設備,即用于交會的測量裝置和用于對接的對接機構。
2個航天器要想在太空交會,主要依靠航天器上交會測量裝置,它是航天器之間進行交會靠攏的“眼睛”。目前主要有四種測量裝置:
01
一是微波雷達,其測量范圍從相對距離100千米~100米,距離小于100米時誤差較大;
02
二是激光雷達,其測量范圍從相對距離20千米~10米,其測量精度比較高;
03
三是光學成像敏感器,測量范圍從相對距離100~1米,它的測量精度更高;
04
四是對接敏感器,其測量范圍從相對距離10~0米。另外,還廣泛使用全球衛(wèi)星導航定位系統(tǒng)。

飛船拍攝的空間站核心艙前端
所以,兩個航天器相距較遠時使用微波雷達、激光雷達、衛(wèi)星導航定位接收機;相距較近時使用光學成像敏感器和對接敏感器。另外,交會測量設備在每個飛行階段都應有備份,以防交會測量設備突發(fā)故障而導致交會對接失敗。
兩個航天器要想在太空對接,要依靠航天器上的對接機構。目前主要使用兩種:
一是“桿-錐”式對接機構,其優(yōu)點是結構簡單,質(zhì)量較輕;缺點是對接機構全部安裝在航天器殼體內(nèi)部,對接后占據(jù)較大內(nèi)部空間,承載能力也比較低。目前,俄羅斯“聯(lián)盟”系列載人飛船、“進步”系列貨運飛船與“國際空間站”的對接均采用“桿-錐”式對接機構。

俄羅斯進步M-M貨運飛船伸出對接用的桿準備對接

俄羅斯飛船對接到“國際空間站”俄羅斯艙段后,由于桿-錐式對接機構占用艙門附近通道,所以需要拆除它們
二是“異體同構周邊”式對接機構,其優(yōu)點是對接后通道暢通,因?qū)舆B接環(huán)直徑較大、承載能力大,所以適宜各種質(zhì)量航天器間對接;缺點是結構比較復雜,質(zhì)量較大。
目前,美國“載人龍”與“國際空間站”、我國“神舟”載人飛船、“天舟”貨運飛船與“天宮”空間站之間的對接均采用“異體同構周邊”式對接機構。

我國“異體同構周邊”式對接機構

印度“異體同構周邊”式對接機構
05
兩種對接模式
航天器之間的空間交會對接現(xiàn)有標準對接模式和快速對接模式,其中采用標準對接模式大致分為以下四個階段:
地面導引階段
在兩個空間飛行器相距1萬千米~100千米時,追蹤飛行器要在地面控制中心的操縱下,經(jīng)過若干次變軌機動,進入到追蹤飛行器上的交會測量設備能捕獲目標飛行器的范圍內(nèi)。
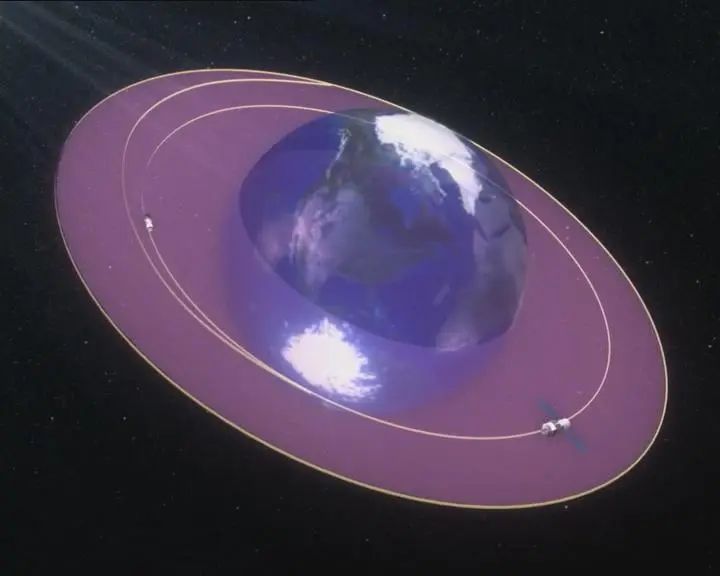
追蹤飛行器變軌追趕目標飛行器示意圖
自動尋的階段
在兩個空間飛行器相距100千米~100米時,追蹤飛行器通過雙方攜帶的交會測量設備自動引導到目標飛行器附近,進入對接走廊。
最終逼近階段
在兩個空間飛行器相距100~1米時,追蹤飛行器利用測量系統(tǒng)精確測量兩個飛行器的距離、相對速度和姿態(tài),同時啟動小發(fā)動機進行機動,使之沿對接走廊向目標最后逼近,此時兩個航天器的相對速度約3~1米/秒。
對接合攏階段
在兩個空間飛行器相距1米以內(nèi)時,必須軸向?qū)R,追蹤飛行器關閉發(fā)動機,發(fā)出對接信號,伸出對接機構。目標飛行器打開撞鎖,追蹤飛行器以0.2米/秒的停靠速度與目標接觸,在結構上實現(xiàn)硬連接,包括管路、電源、通信線路連接等。
國外有的貨運飛船采用“停靠”方式進行對接,即當飛船與空間站接近到10米距離時,使兩者相對速度接近零,然后由空間站上的機械臂將其捕獲與空間站對接。這種對接方式可減少飛船上對接系統(tǒng)的質(zhì)量、成本和復雜性。

日本貨運飛船采用美國技術,通過空間站上的機械臂與“國際空間站”對接
采用標準對接模式,追蹤飛行器要經(jīng)過2天左右的飛行才能與作為目標飛行器對接。最近幾年,中俄等國在載人航天活動中開始使用快速對接模式,宇宙飛船只需要飛行6.5小時或更短時間就能與空間站實現(xiàn)對接。
實現(xiàn)快速交會對接主要是把原來遠距離導引段需要地面干預的工作交由兩個空間飛行器的星上計算機自主運行,即把原來的“地面遠程導引段”改為“自主”,基于衛(wèi)星導航系統(tǒng)提供宇宙飛船與空間站的實時位置信息,宇宙飛船星載計算機可自主定軌并計算出變軌數(shù)據(jù),進而控制軌控發(fā)動機進行自主變軌,實現(xiàn)遠距離、全自主的導航計算與制導控制。
結束遠程導引段后的動作與以往對接任務相比則完全一致。6.5小時快速交會對接只需繞地球飛行4圈,前3圈每圈變軌2次。而以往采用標準對接模式,宇宙飛船需繞地球飛行30多圈才能與目標飛行器對接。
據(jù)悉,印度采用的空間交會對接方案主要依托基于差分全球?qū)Ш叫l(wèi)星系統(tǒng)的衛(wèi)星定位系統(tǒng)。
06
中國交會對接
目前,我國空間交會對接技術比較成熟,不僅掌握了自控和手控交會對接技術、快速交會對接技術,其中天舟五號貨運飛船創(chuàng)造了僅飛行兩小時就與“天宮”空間站成功對接的世界空間站最快交會對接紀錄,還掌握了徑向自主交會對接技術。
所謂徑向?qū)泳褪禽d人飛船通過空間站的“天和”核心艙下方對接口與空間站進行交會并對接,雖然只是方向變了90°,但是對接的難度卻大了不少,我國徑向交會對接整個過程都是在制導導航與控制系統(tǒng)指揮下飛船智能自主完成的。

神舟13號(下)與核心艙的節(jié)點艙徑向交會示意圖
為了適應空間站運營多對接口和快速交會對接的新需求,我國空間站階段為交會對接任務新增了飛行特征點——中瞄點,它是載人飛船、貨運飛船和空間站交會對接前的“中轉(zhuǎn)站”,位置在空間站后下方,通過該點可以最方便地,快速完成與空間站前向、徑向和后向?qū)涌诘慕粫樱哂惺r(時間)省力(推進劑消耗)的特點。
我國在完成嫦娥五號任務時,在世界上首次進行了月球軌道的無人交會對接,即嫦娥五號的著陸器-上升器組合體在完成月面采樣后,上升器要攜帶月球樣品從月面起飛,前往月球軌道,與在月球軌道飛行的軌道器-返回器組合體進行交會對接,然后把月球樣品從上升器轉(zhuǎn)移到返回器中。
在月球軌道交會與在地球軌道交會對接有所不同。我國在地球軌道上有著比較成熟的航天器交會對接經(jīng)驗,多次采用“小追大”的模式,即小質(zhì)量飛船追大質(zhì)量“天宮”。
但在月球軌道上進行交會對接要“大追小”,即用有較多燃料的大質(zhì)量的軌道器-返回器組合體追小質(zhì)量的上升器,而且距離地球幾十萬公里,稍微控制不好就會產(chǎn)生偏離,因此對交會對接的精度要求更高。

上升器與軌道器-返回器組合體在月球軌道交會對接示意圖(來源:航天八院)
另外,為了防止大質(zhì)量軌道器-返回器組合體對接時撞開小質(zhì)量上升器,它們在月球軌道交會對接時采用停靠抓捕式交會對接方式,因此,研制了一種被稱為抱爪式的空間輕小型弱撞擊對接機構裝在軌道器上。對接時,它先“擁抱”上升器,然后再對接上升器,這些設計理念都是世界首創(chuàng)。
這些技術的成功,也為我國2030年前實施載人登月時在月球軌道進行載人交會對接奠定了基礎。
作者:龐之浩
全國空間探測技術首席科學傳播專家
責編:董小嫻
審核:張超 李培元
上一篇:難以想象,燙頭發(fā)和蒸饅頭是的原理居然是一樣的?
下一篇:返回列表
【免責聲明】本文轉(zhuǎn)載自網(wǎng)絡,與科技網(wǎng)無關。科技網(wǎng)站對文中陳述、觀點判斷保持中立,不對所包含內(nèi)容的準確性、可靠性或完整性提供任何明示或暗示的保證。請讀者僅作參考,并請自行承擔全部責任。